



پرداخت حق عضویت سالیانه سایت
پرداخت حق عضویت سالیانه از این قسمت
![]()
تبلیغات

کانال تلگرام مجستیک

به کانال تلگرام مجستیک الکترونیک بپیوندید

شرح عملکرد روبات
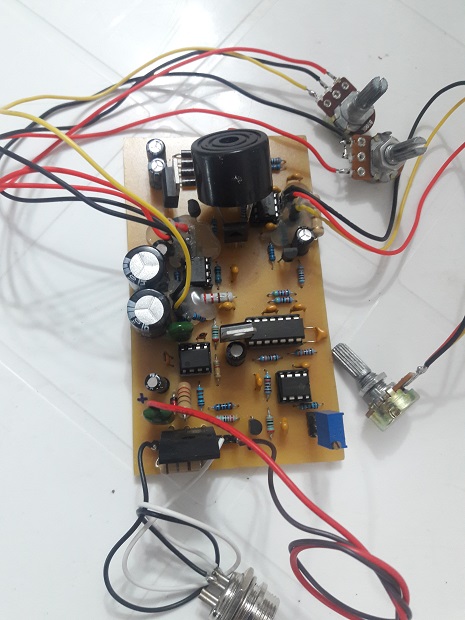
روباتي که در اينجا تصميم به تو ضيح نحوه ساخت آنرا دارم بروي زمينه سفيد بدنبال خط مشکي حرکت ميکند. ميکروکنترلر مورد استفاده در روبات ATmega8 می باشد. و کدهای برنامه روبات با استفاده از نرم افزار BASCOM ایجاد شده اند.
روبات شامل دو موتور در طرفين خود مي باشد، که جهت حرکت به جلو هر دو موتور را روشن مي کند، زمان دور زدن به چپ موتور سمت چپ خاموش و موتور سمت راست روشن مي شود و برای دور زدن به سمت راست موتور سمت راست خاموش و موتور سمت چپ روشن می شود. البته موتورهای بکار رفته DC موتور بوده و جهت کاهش سرعت و در نتیجه کنترل دقیق تر روبات از موتورهايي با گیربکس سرخود استفاده شده، که قیمت آن در بازار جمهوری تهران 7000 تومان است در صورتی که به این نوع موتور دسترسی ندارید ميتوانید از موتورهای اسباب بازی گیربکس دار استفاده کنید، در غير اين صورت بايستي خودتان گیربکس را بسازيد دقت داشته باشيد که دور نهايي چرخش چرخهاي روبات 60 دور بر دقیقه باشد.
برای تشخيص مسير از دو LEDپر نور استفاده شده که سطح مسير حرکت را روشن مي کنند و انعکاس نور به فتو رزيستورهای قرار گرفته در زیر روبات برخورد مي کند. اگر روبات روی خط باشد مقدار نور منعکس شده حداقل بوده و در نتيجه مقدار مقاومت آن افزايش ميابد و ولتاژ دو سر آن افزايش مي يابد و میکروکنترلر از روی اين تغيير ولتاژ متوجه وجود خط مي گردد.(در غیر اين صورت نور منعکس شده زياد بوده، مقدار مقاومت فتورزيیستور کاهش ميابد و ولتاژ دوسر آن کاهش ميابد.)پس همانطور که ذکر شد میکرو کنترلر تغييرات ولتاژ فتورزيستور را احساس ميکند. من براي اين کار از مبدل های درونی آنالوگ به ديجیتال ميکرو استفاده کردم. البته دو عدد فتورزیستور به همراه دوLED جهت تشخیص طرفین مسير استفاده شده.
ادامه مطلب





.jpg)